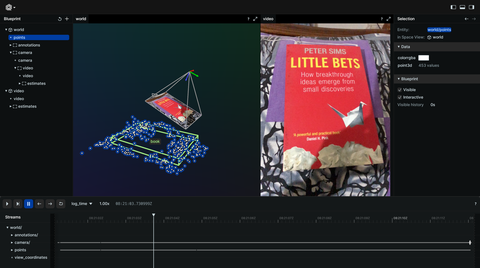
Visualize the Google Research Objectron dataset including camera poses, sparse point-clouds and surfaces characterization.
Used Rerun types
Points3D, Boxes3D, Image*, Transform3D, Pinhole
Background
This example visualizes the Objectron database, a rich collection of object-centric video clips accompanied by AR session metadata. With high-resolution images, object pose, camera pose, point-cloud, and surface plane information available for each sample, the visualization offers a comprehensive view of the object from various angles. Additionally, the dataset provides manually annotated 3D bounding boxes, enabling precise object localization and orientation.
Logging and visualizing with Rerun
The visualizations in this example were created with the following Rerun code:
Timelines
For each processed frame, all data sent to Rerun is associated with the two timelines time and frame_idx.
rr.set_time_sequence("frame", sample.index) rr.set_time_seconds("time", sample.timestamp)
Video
Pinhole camera is utilized for achieving a 3D view and camera perspective through the use of the Pinhole and Transform3D archetypes.
rr.log( "world/camera", rr.Transform3D(translation=translation, rotation=rr.Quaternion(xyzw=rot.as_quat())), )
rr.log( "world/camera", rr.Pinhole( resolution=[w, h], image_from_camera=intrinsics, camera_xyz=rr.ViewCoordinates.RDF, ), )
The input video is logged as a sequence of ImageEncoded objects to the world/camera entity.
rr.log("world/camera", rr.ImageEncoded(path=sample.image_path))
Sparse point clouds
Sparse point clouds from ARFrame are logged as Points3D archetype to the world/points entity.
rr.log("world/points", rr.Points3D(positions, colors=[255, 255, 255, 255]))
Annotated bounding boxes
Bounding boxes annotated from ARFrame are logged as Boxes3D, containing details such as object position, sizes, center and rotation.
rr.log( f"world/annotations/box-{bbox.id}", rr.Boxes3D( half_sizes=0.5 * np.array(bbox.scale), centers=bbox.translation, rotations=rr.Quaternion(xyzw=rot.as_quat()), colors=[160, 230, 130, 255], labels=bbox.category, ), timeless=True, )
Setting up the default blueprint
The default blueprint is configured with the following code:
blueprint = rrb.Horizontal( rrb.Spatial3DView(origin="/world", name="World"), rrb.Spatial2DView(origin="/world/camera", name="Camera", contents=["/world/**"]), )
In particular, we want to reproject the points and the 3D annotation box in the 2D camera view corresponding to the pinhole logged at "/world/camera". This is achieved by setting the view's contents to the entire "/world/**" subtree, which include both the pinhole transform and the image data, as well as the point cloud and the 3D annotation box.
Run the code
To run this example, make sure you have Python version at least 3.9, the Rerun repository checked out and the latest SDK installed:
# Setup pip install --upgrade rerun-sdk # install the latest Rerun SDK git clone git@github.com:rerun-io/rerun.git # Clone the repository cd rerun git checkout latest # Check out the commit matching the latest SDK release
Install the necessary libraries specified in the requirements file:
pip install -e examples/python/objectron
To experiment with the provided example, simply execute the main Python script:
python -m objectron # run the example
You can specify the objectron recording:
python -m objectron --recording {bike,book,bottle,camera,cereal_box,chair,cup,laptop,shoe}
If you wish to customize it, explore additional features, or save it use the CLI with the --help option for guidance:
python -m objectron --help